scenario monopod¶
Scenario is an abstract layer that is used to interface with robots 1 by exposing APIs to interact with a scene. The scene is defined as a World object that can return Model objects. This allows the simulated or physical robot to be implemented as a separate scenarIO back-end, which can be switched between.
The vanilla scenario package comes with everything required to interface into the
ignition gazebo simulator. Then the scenario_monopod package
extends this API with the monopod real-time backend.
This allows the physical robot and the simulated robot to be easily switched between without requiring many changes to the upstream code (most changes are dependency related).
Package Architecture¶
The architecture can be easily represented as a diagram. This diagram shows how scenario_monopod
simply implements the monopod_sdk API with the scenario interface. This means that we have both the
simulation and real-time backends in place. Which allow us to write code to control your robot just once,
it will interact either with the simulated or the real robot depending on the ScenarIO backend you enabled.
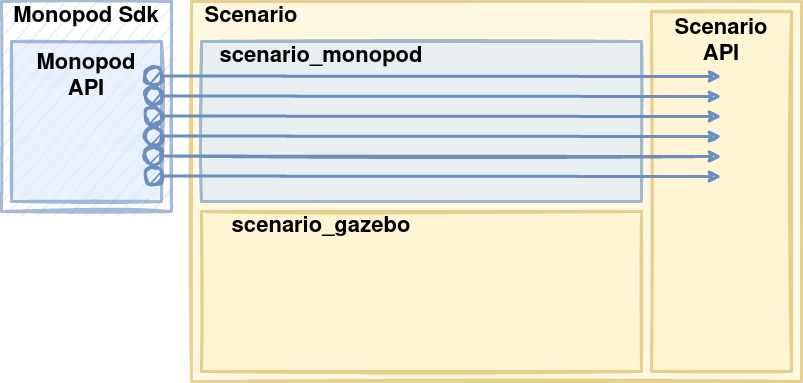
Scenario monopod implements the scenario base class using the monopod_sdk API
as the real-time backend for the physical robot. THis allows the scenario_monopod package to
behave as a extension or plugin for the vanilla scenario 1.¶
Tip
The interface / implementation pattern is implemented using classic inheritance and
polymorphism design patterns. Having such unified interface simplifies the process to expose it to
other languages. Thanks to SWIG, we officially provide Python bindings of scenario_monopod,
this way you can prototype your applications even faster! In both simulation and real!
Using scenario_monopod¶
For a comprehensive tutorial on using scenario_monopod please visit Using Scenario Monopod. Using
the dummy control board backend of monopod_sdk we can create a simple script that uses scenario_monopod
without requiring the physical hardware.
Note
dummy control board is a backend that fakes the real robot control boards class. This is useful for developing without requiring a connection to the physical robot. Eventually this dummy class may be improved to act as a simple physics engine that will maintain rough positions, etc.
Now to create a simple executable that uses scenario_monopod with the dummy backend you must first
install scenario_monopod using the superbuild and
source your workspace. Once your workspace has all dependencies
sourced create the following files in their own folder anywhere on your computer.
C++¶
#include <scenario/monopod/Joint.h>
#include <scenario/monopod/Model.h>
#include <scenario/monopod/World.h>
#include <chrono>
#include <iostream>
#include <string>
#include <thread>
int main(int argc, char *argv[]) {
// Set up the world
scenario::monopod::World world;
world.initialize(/*monopod_drivers::Mode=*/monopod_drivers::Mode::MOTOR_BOARD,
/*dummy_mode=*/true);
// Print world name
std::cout << "World Name: " << world.name() << std::endl;
// model names from world and model
auto modelNames = world.modelNames();
std::cout << "Model Name in world Index 0: " << modelNames[0] << std::endl;
auto monopod = world.getModel(modelNames[0]);
std::cout << "Model Name: " << monopod->name() << std::endl;
// Print joint names from model
auto jointNames = monopod->jointNames(true);
std::cout << "joint names: ";
for (std::string i : jointNames)
std::cout << i << ", ";
std::cout << std::endl << std::endl;
std::vector<double> forces = {1, 2};
std::vector<std::string> jNames = {"knee_joint", "hip_joint"};
// Set hip and knee joint to be controllable.
std::cout << "Setting all joints force controlMode successful? "
<< monopod->setJointControlMode(
scenario::core::JointControlMode::Force, jNames)
<< std::endl
<< std::endl;
// Set force target for hip and knee joint
bool ok = monopod->setJointGeneralizedForceTargets(forces, jNames);
std::cout << "Setting force successful? " << ok << std::endl << std::endl;
// Get meassurements
auto pos = monopod->jointPositions(jNames);
std::cout << std::endl << "Joints position: ";
for (auto i : pos)
std::cout << i << ", ";
std::cout << std::endl << std::endl;
auto vel = monopod->jointVelocities(jNames);
std::cout << std::endl << "Joints Velocity ";
for (auto i : vel)
std::cout << i << ", ";
std::cout << std::endl << std::endl;
auto acc = monopod->jointAccelerations(jNames);
std::cout << std::endl << "Joints Acceleration ";
for (auto i : acc)
std::cout << i << ", ";
std::cout << std::endl << std::endl;
return 0;
}
cmake_minimum_required(VERSION 3.16)
project(ExampleWithScenario VERSION 1.0)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
find_package(Scenario COMPONENTS Monopod REQUIRED)
add_executable(ExampleWithScenario example.cpp)
target_link_libraries(ExampleWithScenario PRIVATE ScenarioMonopod::ScenarioMonopod)
Place both files in the same folder. Then run the the following commands to compile and run the executable.
# Build executable from source in current directory into ./build location
cmake -S . -B build
cmake --build build
# Run the executable
./build/ExampleWithScenario
Python¶
Implementing the same code using python bindings instead. This assumes the same installation instructions were followed as the CPP example.
from scenario import monopod as scenario
from scenario import core as scenario_core
# Create the world
world = scenario.World()
modes = {
"free_hip" : scenario.Mode_free,
"fixed_hip" : scenario.Mode_fixed_connector,
"fixed" : scenario.Mode_fixed,
"simple" : scenario.Mode_motor_board
}
world.initialize(modes['simple'], dummy_mode=True)
print(f"World Name: {world.name()}")
model_name = world.model_names()[0]
print(f"Model Name in world Index 0: {model_name}")
model = world.get_model(model_name)
print(f"Model Name: {model.name()}")
Jnames = model.joint_names()
print(f"joint names: {Jnames}")
ok = model.set_joint_control_mode(scenario_core.JointControlMode_force, Jnames)
print(f"Setting all joints force controlMode successful? {ok}")
forces = [1, 2]
Jnames = ["knee_joint", "hip_joint"]
ok = model.set_joint_generalized_force_targets(forces, Jnames)
print(f"Setting force successful? {ok}")
pos = model.joint_positions(Jnames)
vel = model.joint_velocities(Jnames)
print(f"joints: {Jnames}, Pos: {pos}, Vel: {vel}")
# To set joint limits you need to convert to derived class. for example,
model_monopod = scenario.ToMonopodModel(model)
joint_monopod = scenario.ToMonopodJoint(model.get_joint(Jnames[0]))
min_lim, max_lim = -10, 10
joint_monopod.set_joint_position_limit(max_lim, min_lim)
- 1(1,2)
Diego Ferigo, Silvio Traversaro, Giorgio Metta, and Daniele Pucci. Gym-ignition: reproducible robotic simulations for reinforcement learning. In 2020 IEEE/SICE International Symposium on System Integration (SII), volume, 885–890. 2020. doi:10.1109/SII46433.2020.9025951.