monopod sdk¶
Implements drivers for the physical robot, accompanied by an API to control the monopod and/or receive measurements from the robot. Additionally, Monopod SDK implements safety limits that run independently in a separate thread.
Introduction¶
This package contains the drivers for the planarized monopod sim2real platform
designed by OpenSim2Real. These drivers provide an interface to send commands and
receive observations. The drivers will automatically detect if your system has the
real-time kernel enabled and will enable it inside the communication thread.
This package is directly derived from the drivers for the brushless motors developed in the Max Planck Institute for Intelligent System. The original source code can be found here. 1
This package provides a very simple API in order to acquire the sensor data and send
the controls to the actuators.
Example of use of this package can be seen in the different demos
(PROJECT_SOURCE_DIR/demos) or in different unittests (PROJECT_SOURCE_DIR/tests).
The demos contains the documentation inside the code. The unittests should be
simple enough to understand without additional documentation.
Device Interface¶
The BLMC stands for BrushLess Motor Control.
This package provides guidelines on how a device should
be implemented (see also the monopod_drivers::DeviceInterface class).
generally, we expect the following functions to be implemented:
a set function for each input (several inputs may share a set function which takes an index argument).
a
send_if_input_changed()function which will send the inputs to the device if any of them have changed.functions to access the current inputs and outputs, as well as the inputs which have been sent to the device. Rather than just returning the latest elements, these function should return a time series of these objects, such that the user can synchronize (e.g. wait for the next element or step through them one by one such that none of them is missed)
Package Architecture¶
The architecture can be easily represented as a diagram. The package is designed
in an abstract way meaning a lot of the components inherent features from other sub-classes.
One example of this is how the monopod_drivers::MotorInterface class inherits all the measurement code from
the monopod_drivers::EncoderInterface class. This design pattern allows the control boards to be replaced in
the future without having to modify everything upstream.
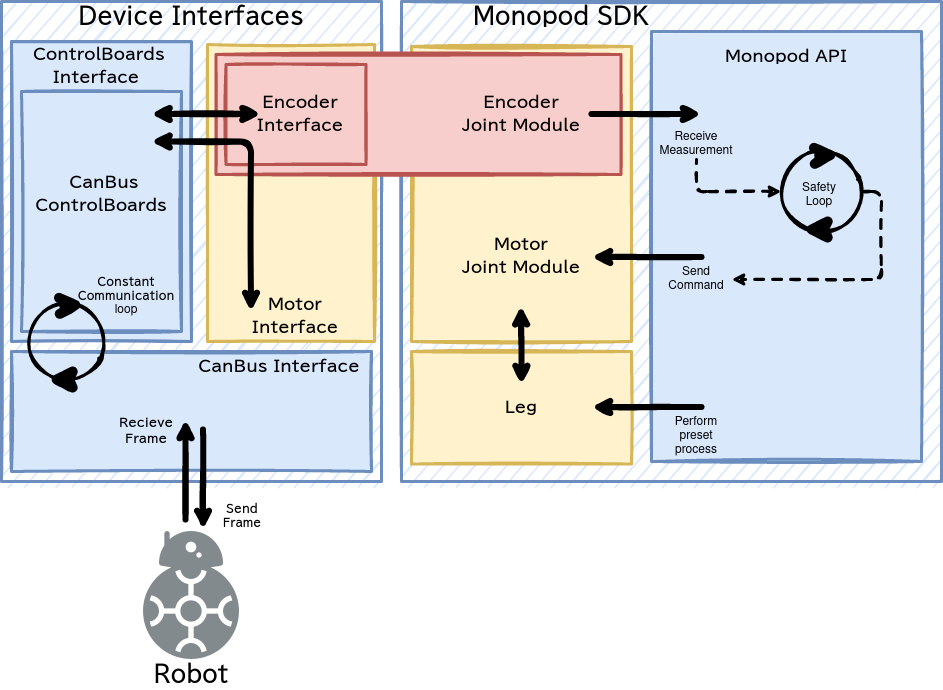
monopod_sdk architecture. Illustrates how inheritence and the flow of information
is handled between each major component of monopod_sdk. Not all classes have been included
for clarity. For example, monopod_drivers::EncoderInterface was shown without including
monopod_drivers::Encoder.¶
The top level class which exposes the robot API to the user is monopod_drivers::Monopod.
Using Monopod SDK¶
For a comprehensive tutorial on using monopod_sdk please visit Using the SDK. Using
the dummy control board backend we can create a simple script that runs monopod_sdk.
Note
dummy control board is a backend that fakes the real robot control boards class. In the
figure above it would replace the CanBusControlBoards class. This is useful for developing
without requiring a connection to the physical robot. Eventually this dummy class may be improved
to act as a simple physics engine that will maintain rough positions, etc.
Now to create a simple executable that uses monopod_sdk with the dummy backend you must first
install monopod_sdk using the superbuild and
source your workspace. Once your workspace has all dependencies
sourced create the following files.
#include <math.h>
#include <monopod_sdk/monopod.hpp>
#include <atomic>
#include <fstream>
#include <signal.h>
/**
* @brief This boolean is here to kill cleanly the application upon ctrl+c
*/
std::atomic_bool StopDemos(false);
/**
* @brief This function is the callback upon a ctrl+c call from the terminal.
*
* @param s
*/
void my_handler(int) { StopDemos = true; }
int main(int, char **) {
// make sure we catch the ctrl+c signal to kill the application properly.
struct sigaction sigIntHandler;
sigIntHandler.sa_handler = my_handler;
sigemptyset(&sigIntHandler.sa_mask);
sigIntHandler.sa_flags = 0;
sigaction(SIGINT, &sigIntHandler, NULL);
StopDemos = false;
monopod_drivers::Monopod monopod;
rt_printf("controllers are set up \n");
monopod.initialize(monopod_drivers::Mode::MOTOR_BOARD, /*dummy_mode=*/ true);
rt_printf("initialized monopod sdk in dummy mode \n");
// Set up max torque target (clamps it to this)
monopod.set_max_torque_target(1.5, monopod_drivers::hip_joint);
monopod.set_max_torque_target(1.5, monopod_drivers::knee_joint);
// example of joint position limit
monopod.set_joint_position_limit(/*max=*/ 15, /*min=*/ 15, /*joint_index=*/ monopod_drivers::hip_joint);
// Starting safety loops which enforces joint limits
monopod.start_safety_loop();
/**
If monopod entered safemode (limit reached). Physically reset the limits then run,
monopod.reset(false); \\move_to_zero=false is parameter
*/
while (!StopDemos) {
// Printing Status
rt_printf("\33[H\33[2J"); // clear screen
monopod.print(); // print info
// Get position Data example
auto pos_data = monopod.get_positions().value();
fflush(stdout);
real_time_tools::Timer::sleep_sec(0.5);
} // endwhile
return 0;
}
cmake_minimum_required(VERSION 3.16)
project(ExampleWithMonopod VERSION 1.0)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
find_package(MonopodSdk REQUIRED)
add_executable(ExampleWithMonopod example.cpp)
target_link_libraries(ExampleWithMonopod PRIVATE MonopodSdk::MonopodSdk)
Place both files in the same folder. Then run the the following commands to compile and run the executable.
# Build executable from source in current directory into ./build location
cmake -S . -B build
cmake --build build
# Run the executable
./build/ExampleWithMonopod
The expected behaviour of the executable will be outputting only zero for each measurement. This is because the dummy back-end only outputs zero for all measurements and only returns success (true) for each command sent.
- 1
F. Grimminger, A. Meduri, M. Khadiv, J. Viereck, M. Wüthrich, M. Naveau, V. Berenz, S. Heim, F. Widmaier, T. Flayols, J. Fiene, A. Badri-Spröwitz, and L. Righetti. An open torque-controlled modular robot architecture for legged locomotion research. IEEE Robotics and Automation Letters, 5(2):3650–3657, 2020. doi:10.1109/LRA.2020.2976639.