Connecting By CAN¶
Introduction¶
Both TI LAUNCHXL microcontroller boards communicate with a computer via CAN protocol. This page provides instructions on how to establish CAN communications between the microcontrollers and a computer.
These instructions are derived from ODRI’s instructions for establishing CAN communications, which are still worth reading.
A comprehensive guide to the CAN protocol can be found here.
Hardware¶
ODRI recommends using the PEAK Systems PCAN PCI Express Card as a CAN network-to-computer interface. This PCI Express Card allows multiple CAN channels to be handled at the same time, allowing for future extension. PEAK Systems device drivers are also natively integrated into the Linux operating systems, so no additional installation steps are required.
However, the PCAN PCI Express Card has a number of disadvantages. It is quite expensive when compared to other CAN interfaces. It also requires access to the computer’s PCI Express slots, which is difficult or impossible to do on a compact laptop.
Our team recommends using the PEAK Systems CAN to USB as a CAN network-to-computer interface. This allows an easy connection to a laptop computer through a USB port, while offering good software support for the Linux operating system. Our team also recommends using the open-source CANable CAN interface device, which is cheaper than the PEAK Systems device, but is more difficult to source.
Our team does not recommend using cheap CAN interfaces without proper documentation or support, such as this one CAN to USB adapter, for a number of reasons. These adapters often use ad-hoc text-based protocols which are not supported by standard CAN libraries such as SocketCAN. A good indicator of whether a CAN interface can be used is found here
Before establishing a network connection, ensure that a physical CAN connection is set up as follows.
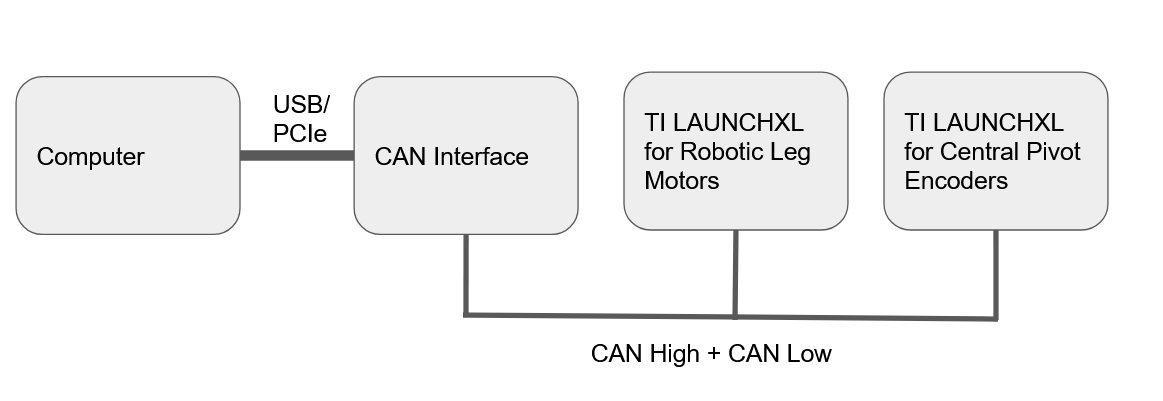
Illustration of CAN connection¶
Connection Setup(CANable)¶
If you are using the CANable interface device. Run the following in a Linux terminal to install utilities for SocketCAN, which is a collection of CAN drivers for Linux.
sudo apt-get install can-utils
If the phyiscal CAN connection has already been set up, check to see where the CAN interface is mounted on your Linux filesystem:
ls /dev
Search for the pattern ttyACMX or ttyUSBX (for example, ttyACM0). This is where the CAN interface will be mounted. Then, run the following to initialize the CAN connection.
sudo slcand -o -c -s8 /dev/ttyACM0 can0
sudo ifconfig can0 up
sudo ifconfig can0 txqueuelen 1000
After that, run the following to check that CAN messages are being sent.
candump can0
If all mechanical, electrical, firmware and software elements have been set up correctly, a dump of all CAN messages being sent will be displayed. CTRL-C exits this command.
To terminate a CAN connection, run the following:
sudo ifconfig can0 down
More information about using the CANable device can be found here:
CANable Getting Started: The CANable interface documentation
CANtact Documentation: The CANtact interface documentation. The CANtact device is a precursor to the CANable device.
Connection Setup(PEAK Systems Devices)¶
If you are using a PEAK Systems interface device, run the following to install SocketCAN utilities:
sudo apt-get install can-utils
Then, run the following to configure the CAN connection speed to 1Mbit/s, and to initialize the CAN connection:
sudo ip link set can0 type can bitrate 1000000 sample-point 0.867
sudo ip link set up can0
After that, run the following to check that CAN messages are being sent.
candump can0
More information about using a PEAK Systems device can be found here:
Connection Setup(Python)¶
It is also possible to interface with the CAN interface in Python. To do this, first install the python-can library:
pip install python-can
Instructions and example scripts can be found on the python-can documentation:
An example script to display encoder positions, velocities and acceleration is found here: