Build Requirements¶
Introduction¶
The following tools and skills are required for successful construction of the Monopod.
Shop and Tool¶
As far as possible, the tools required for successful construction are chosen to be readily available.
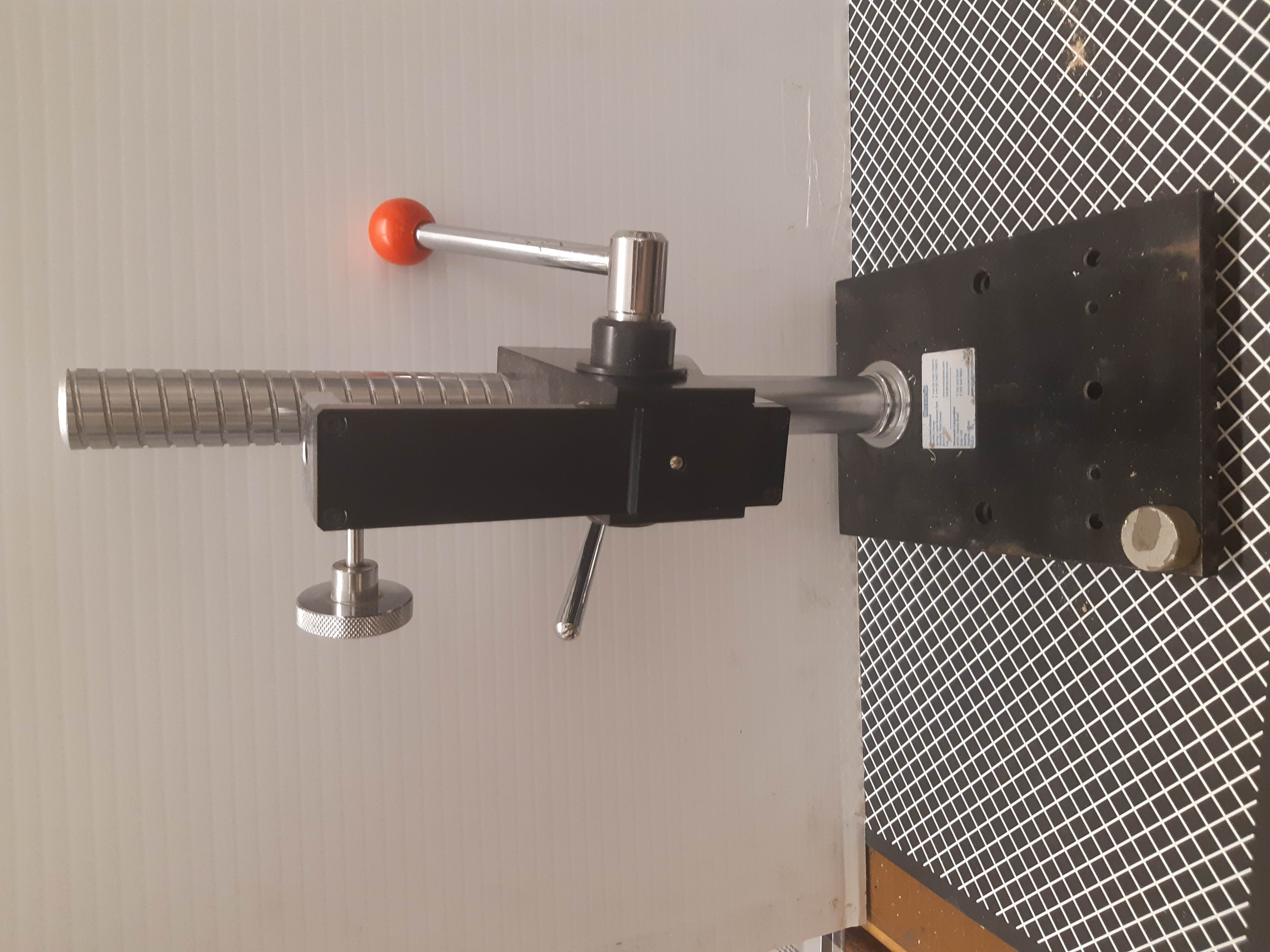
Arbor Press¶ |

Tabletop Mill¶ |

Drill Bits¶ |

Duct Tape¶ |

Electrical Tape¶ |

Epoxy¶ |

Files¶ |

Glue Gun¶ |

Handdrill¶ |

Heatgun¶ |

Helicoil insertion tools for M2.5 and M3¶ |

Hex Screwdrivers¶ |

Masking Tape¶ |
Ruler¶ |

Scissors¶ |

Complete set of screwdrivers¶ |
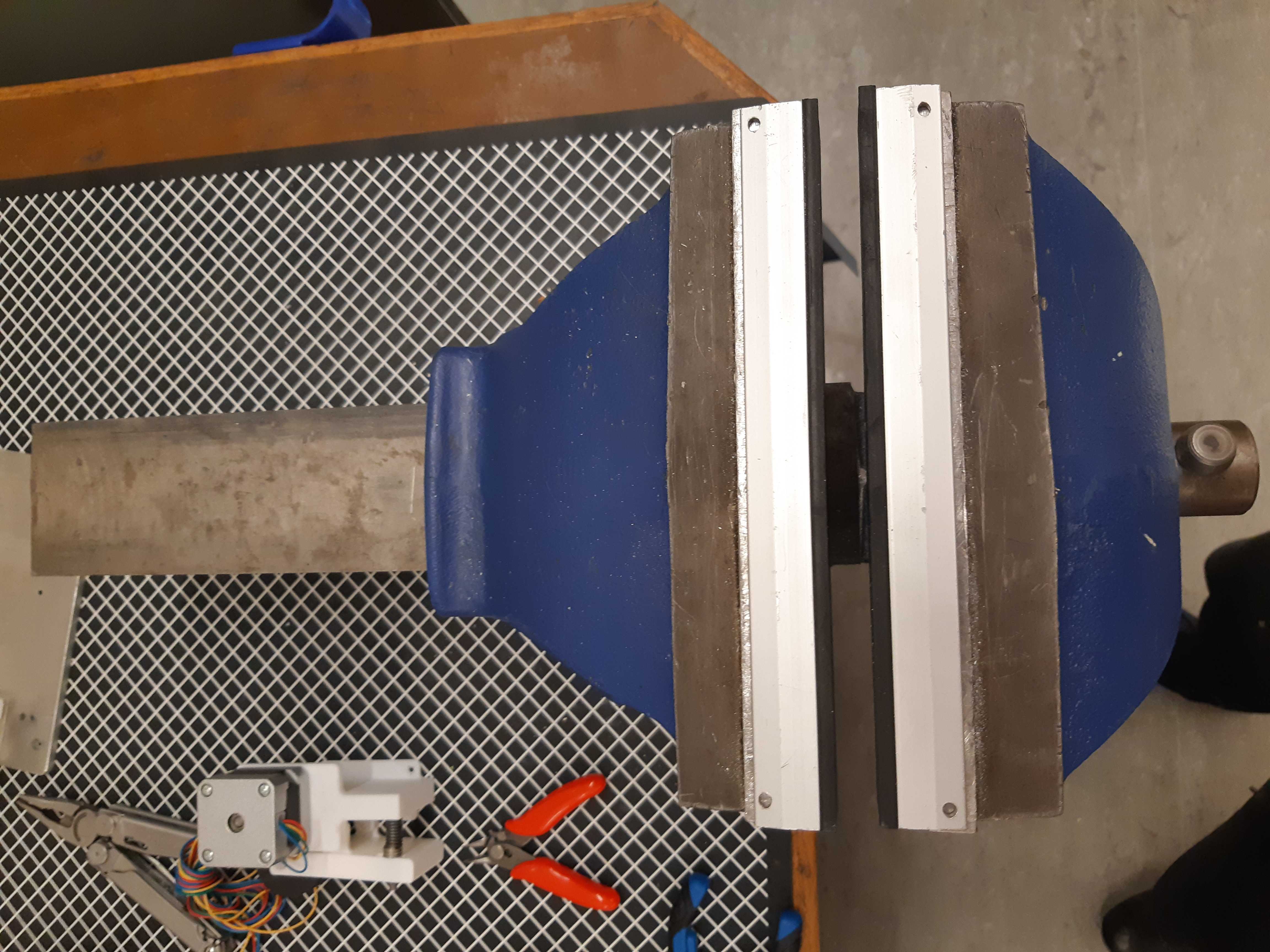
Tabletop Vise¶ |
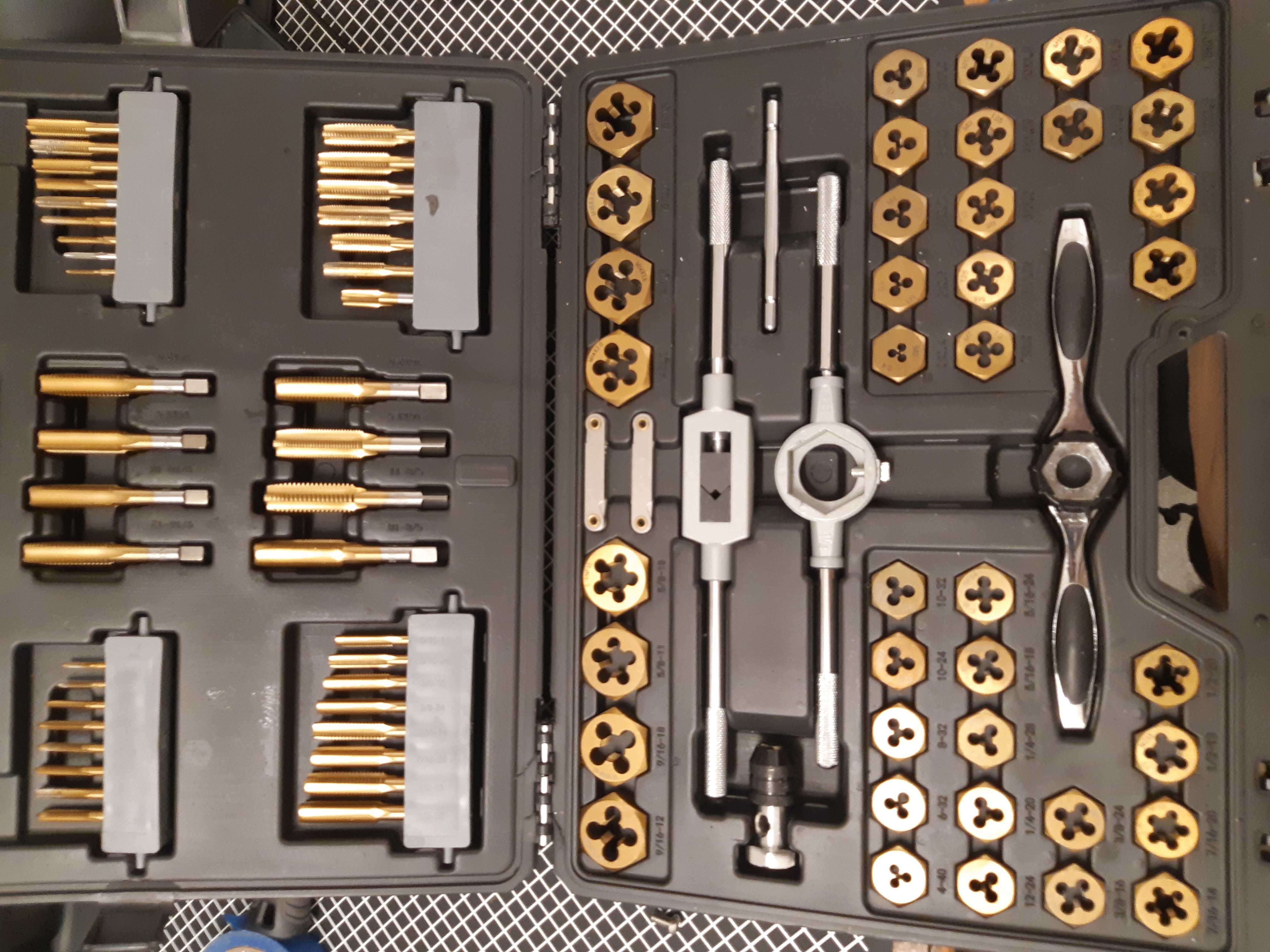
Complete set of taps¶ |

Tweezers¶ |

Needlenose tweezers¶ |

Handheld vise¶ |

Complete set of Metric and Imperial wrenches¶ |

3D printer (recommended)¶ |
Calipers¶ |

Kapton Tape, as thin as possible¶ |

Masking Tape¶ |
|
Waterjet Cutter (recommended) |
Handsaw |

Solder, as thin as possible¶ |

Wire stripper¶ |

Assorted Heatshrink¶ |

Wire Snips¶ |
Soldering Hand¶ |

Soldering Station¶ |
JST Crimper |
If the encoder code wheels require rework(see :ref`Robotic Leg Build Instructions <build_instructions_leg>`), then access to a well-equipped machine shop is required. This will be explained in greater detail in a later section, but avoiding rework of encoder code wheels by purchasing ready-made code wheels is recommended. Otherwise, access to the following equipment is required:
Lathe
Milling machine
Technical¶
The following mechanical assembly & design skills are required to assemble the physical robot:
Familiarity with CAD software such as Onshape and SOLIDWORKS
Waterjet cutting
3D printing
Drilling and tapping holes
Insertion of Helicoils
The following electrical skills are required to assemble the physical robot:
Soldering and Wiring
Measurement with oscilloscope and multimeter
Wire crimping for JST connectors
Reading electrical schematics
The following software skills are required to setup the code infrastructure for the physical robot:
Python, C, C++ programming languages
Familiarity with Windows and Linux operating systems. A dual-booted laptop with Windows 10/11 and Ubuntu 18.04/20.04 or PopOS, a decent processor and at least 8GB of RAM is recommended.
Git version control
Embedded software development
Familiarity with Field Oriented Control for motors.
This build assumes the availability of computers running Ubuntu 20.04 and Windows 10 operating systems. Learning resources to gain familiarity with the necessary toolchains and techniques are in Further Reading & Resources.